
5G is all about data, speed and reliability in high frequency mmWave bands. The lack of conventional external RF connectors makes 5G device characterization challenging enough. However, for beamforming scenarios where multiple angles of arrival need to be considered, the test setup reaches a new level of complexity. With a novel multiple compact antenna test range (CATR), the required footprint for radio resource management (RRM) measurement, for example, can be reduced significantly, while maintaining low measurement uncertainty inside a defined quiet zone encompassing the entire wireless device.
In the 5G FR2 mmWave frequency bands, several measurement applications require multiple angles of arrival for device characterization: MIMO, a technique with two or more spatial layers to increase data speeds, used in both 4G and 5G; RF fading with multiple impinging waves; simultaneous in-band and spurious emissions monitoring; and RRM.1 One common example of an RRM scenario is when a 5G wireless device monitors the power levels from several base stations and performs a handover to a different base station when the signal from the first one drops below a given threshold.
Assuming these base stations are in the far-field of the wireless device, the far-field distance is calculated by the Fraunhofer formula: RFF = 2D2/λ, where RFF is the far-field distance, D is the quiet zone or device under test (DUT) size and λ is the wavelength. RFF is roughly 24 m at 40 GHz for a typical wireless device with a maximum diagonal of 30 cm. Although mmWave antenna array modules have apertures of 1 to 2 cm, several modules are typically placed at different locations inside the device, and they can be activated simultaneously, requiring a “black box” approach, i.e., where the minimum quiet zone is bounded by the maximum device size.
Measurement techniques for RRM and RF fading include cabled measurements for communications systems below 7 GHz and wireless over-the-air (OTA) in the far-field of the DUT above 24 GHz. While cabled measurements are faster and less complex, they are not as representative of real-world conditions as wireless OTA measurements. To simulate multiple base stations or angles of arrival in the far-field of the DUT, probes or transmitting antennas are typically placed at distances corresponding to the desired quiet zone size or the minimum allowed measurement uncertainty.2 For measurements of larger wireless devices in the mmWave region, this yields physically large setups. If the probes are placed much closer than the minimum Fraunhofer distance to the DUT, measurement uncertainty increases. Considering a 30 cm quiet zone at 40 GHz, a direct far-field approach requires an RRM OTA system of at least 45×12 m with an angular probe separation of 150 degrees. An alternative is an indirect far-field approach using a CATR, which reduces the range length and decreases the size of the measurement system.
This article proposes a novel multiple CATR (multi-CATR) approach to reduce the required RRM measurement footprint (length × width) while maintaining low measurement uncertainty inside a quiet zone encompassing the entire wireless device.3 For a 30 cm quiet zone, the footprint is 4.6 m2. This arrangement can simulate scenarios with multiple base station pairs interacting with the DUT,4 and the relevance and accuracy of this measurement approach is demonstrated.
RRM SPECIFICATIONS
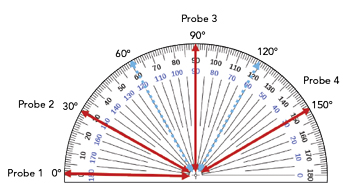
Figure 1 The five base station pairs required by the 3GPP RRM specification can be achieved with four antennas.
The 3GPP’s 5G FR2 RRM specifications define five sets of base station pairs positioned at relative angular separations of 30, 60, 90, 120 and 150 degrees.5 Wireless device performance is measured for each pair broadcasting on either different frequencies or in different time slots. Figure 1 shows how the angular separations can be achieved with four antenna probe locations, rather than using six antenna probes at 0, 30, 60, 90, 120 and 150 degrees. Probes 2 and 3 are used for the angular spread of 60 degrees and probes 2 and 4 are used for 120 degrees. The probes are arranged in a single plane, as only pairs of switched probes are considered in the 3GPP specifications. With a two-axis positioner for the DUT, the measurement setup can simulate a 3D multiple angles of arrival system. For example, a dynamic angle of arrival scenario simulating a moving DUT can be measured by combining positioner movement with fast switching between the pairs of probes and individual probe power control.
3GPP RRM test cases performed with such a system include neighbor cell power measurements, mobility scenarios, beam management and radio link monitoring. The fundamental measurement parameter in RRM test cases is the Synchronization Signal-based Reference Signal Received Power (SS-RSRP),1 defined as the linear average of the power contributions from the elements containing the synchronization signals. In all RRM test scenarios, the wireless device makes decisions using the measured SS-RSRP for each cell.
CATR REFLECTOR DESIGN
Figure 2 Typical CATR Geometry.
A CATR uses a paraboloid reflector with a feed antenna placed at its single focal point, which transforms a spherical wavefront into a planar wave distribution and vice versa (see Figure 2). In the test system discussed in this article, the CATR reflector was developed for a quiet zone of 30 cm with a size of 52 × 54 cm. The reflectors use blended rolled edges to minimize diffraction and scattering inside the quiet zone and to minimize the size of the system.6 The rolled reflector edges were designed for a minimum frequency of 6 GHz. The upper frequency limit is 200 GHz, determined by the surface roughness variation of Rq < 1 μm and an arithmetic average surface roughness of Ra < 1.6 μm. The reflector has a focal length of 70 cm to minimize system size. The short focal length was compensated using a dual-polarized circular choke horn as a feed antenna, which has a wide half-power beamwidth of 60 degrees between 23.45 and 44.3 GHz. The circular choke horn is fed by a waveguide orthomode transducer to provide two orthogonal polarizations.
Like a direct far-field system, an indirect far-field CATR system can measure RF transceiver metrics instantaneously, in both transmit and receive, with measurement uncertainty depending on the dynamic range of the setup. The dynamic range of a CATR system can be much larger than that of a direct far-field approach. The improvement stems from the lower free-space path loss of CATR systems, because of the limited region where the spherical waves propagate between the feed and the reflector. The RF cables inside an indirect far-field system are typically shorter than with a direct far-field system, as the CATR feed antennas are often mounted close to the chamber wall or floor.