
As automotive radars become widespread, the heavily occupied RF spectrum in an urban environment will resemble an electronic battlefield. Radar will face a combination of unintentional-even intentional-jamming, and designers must implement counter-jamming techniques like ones used in electronic warfare (EW). An automotive radar can experience either denial or deceptive jamming. Denial jamming blinds the victim’s radar, reducing the signal-to-noise ratio (SNR) and, as a result, the probability of target detection is degraded. Deceptive jamming makes the victim’s radar “see” targets that are really false. The victim’s radar loses the ability to track the real targets, and vehicle safety is compromised. These jamming attacks could originate from mutual interference between automotive radars or be deliberate, by simply pointing a strong continuous wave (CW) signal into the victim’s radar using inexpensive hardware.
While current jamming avoidance techniques may be adequate today, with the proliferation of radar sensors, more resilient mitigation techniques will be needed, either stand-alone or in conjunction with other approaches. Such techniques include time/frequency domain signal processing or complex radar waveforms.
JAMMING FMCW RADAR

Figure 1 FMCW chirp sequence waveform.
The waveform is a critical system parameter that determines the radar’s performance in the presence of jammers. Automotive radars in the 77 GHz band mainly use FMCW waveforms, where a CW signal is linearly swept or “chirped” in frequency across the RF band (see Figure 1). The frequency difference or beat frequency (fB) between the transmit and receive signals is proportional to the distance to the target (R) and can be determined by

where fsweep is the change in frequency and Tchirp is the time for the frequency sweep.
Unintended jamming can occur in a dense RF environment when FMCW radar sensors are operating in the same portion of the frequency band. A typical automive jamming example is shown in Figure 2a.

Figure 2 Driving scenario (a) with denial jamming (b) and deceptive jamming (c) of an FMCW radar.
Denial Jamming
An arbitrary FMCW jamming signal that falls in the receiver bandwidth of the victim’s radar raises the noise floor (see Figure 2b). Called denial, this jamming may cause small targets-those with small radar cross section (RCS)-to disappear, due to the poor SNR. A denial attack could be purposeful, by simply beaming a strong CW signal into the victim’s FMCW radar.
Deceptive Jamming
If the swept frequency of the jamming signal is delayed and synchronized with the victim’s radar, the impact is a false target generated at a fixed range (see Figure 2c). This technique is commonly used by EW jammers. However, this can occur unintentionally with an oncoming automobile having a similar FMCW radar, although the probability of time alignment between the victim and jamming radars is small. Nonetheless, a jammer delay offset less than the maximum range delay of the victim’s radar could look like a real target. For example, a radar with 200 m maximum range would require sweep alignment of less than 1.3 μs. Such a deceptive attack could be intentional using sophisticated EW equipment mounted on the oncoming automobile.
Generally, deceptive jamming is based on retransmitting the victim radar’s signal with a systematic change in delay and frequency. This signal can be noncoherent, in which case the jammer is called a transponder, or coherent, termed a repeater. Repeaters receive, alter and retransmit one or more jamming signals, while transponders transmit a predetermined signal when the desired victim’s signal is detected by the jammer. A sophisticated repeater-based attack typically requires a digital RF memory (DRFM). A DRFM is capable of carrying out coordinated range delay and Doppler gate pull-off attacks, with the false target range and Doppler properties maintained to deceive the victim’s radar.
Jamming Mitigation
Basic radar jamming mitigation techniques rely on avoidance. The objective is to reduce the probability of overlap in space, time and frequency, using methods such as:
- Spatial: Using a narrow and electronically-scanned beam to reduce the risk of jamming. A typical field of view for long-range automotive cruise control radar is ±8 degrees. Nonetheless, a strong jammer could be effective via the antenna sidelobes.
- Temporal: Randomizing the FMCW chirp slope parameters to avoid periodic jamming.
- Spectral: Randomizing the FMCW chirp start and stop frequencies to reduce the probability of overlap and jamming.
The basic methods of randomization would avoid accidental synchronization with other radars but might not be as effective in dense RF environments. The growing number of radar sensors will require more sophisticated techniques to mitigate possible jamming.
Detect and Repair

Figure 3 FFT (a) and STFT (b) of the radar echo IF waveform with jamming.
An alternative method to avoid jamming is to repair the received waveform using signal processing algorithms. Time/frequency domain techniques can be effective against denial type jamming. In the oncoming automobile scenario (see Figure 2), the jammer sweeps all frequency bins for a very short time duration. This fast time-varying signal manifests itself as a raised noise floor in the fast Fourier transform (FFT) domain. Time/frequency domain signal processing transfers the signal to another domain where it is easier to filter out the jamming.
For time-varying signals, a short time Fourier transform (STFT) provides more information than a regular FFT, and STFT-based techniques can be used for countering narrowband jamming (see Figure 3). The STFT essentially moves a window through the signal and takes the FFT of the windowed region. The signal is filtered in the frequency domain to remove the jammer components before being transformed back to the time domain. Figure 4 shows a typical FMCW jamming scenario of overlapping RF chirp sequences and the IF signals obtained using STFT processing. The plots on the right show the beat signal from mixing the radar (blue) and jamming (orange) signals. A horizontal line indicates a target, while V-shaped vertical lines indicate the presence of a jamming signal. Similar or opposite direction FMCW jamming or a CW-like slow chirp have similar effects on the IF signal. In all these jamming scenarios, the fast moving V-shaped IF signal raises the noise floor in the regular FFT domain, as was seen in Figure 3.
Amplitude-based masking can be used to filter out jamming in the STFT domain. This assumes, of course, that the victim’s radar front-end and quantization have enough dynamic range to linearly process the stronger jammer signal and the small intended target at the same time. Figure 5a shows the STFT signal with a strong jammer, and Figure 5b shows the STFT after amplitude-based masking. Without processing, multiple real targets will not be visible in the presence of a strong jammer; however, amplitude-based masking excises the V-shaped jammer in Figure 5b, enabling the low SNR targets to be discerned when transformed back to the time domain.

Figure 4 Radar and jammer chirps (left) and STFT-processed IF (right) for similar direction (a), opposite direction (b) and CW interference (c) scenarios.

Figure 5 STFT chirp return with strong interference (a) and after amplitude-based masking (b).
While STFT-based jamming mitigation can be used against strong jammers in denial jamming scenarios, with deceptive jamming attacks, STFT alone cannot authenticate whether the return signal is real or false.
Encrypted RF
The simple countermeasure to reduce the impact of deceptive jamming from repeater attacks is using a low probability of intercept (LPI) radar waveform. The objective of an LPI radar is to escape detection by spreading the radiated energy over a wide frequency spectrum, usually via a quasi-random sweep, modulation or hopping sequence. FMCW is a type of LPI waveform, and if phase coding or encryption is used with the frequency chirp, it is possible to further reduce the probability of a DRFM intercepting the radar signal. An encrypted RF signature unique to each radar sensor can authenticate the return signal.
Figure 6 shows a use case where two identical radars are on two different automobiles, and the frequency offset and delay between them generates a false target in the victim’s radar. The jamming radar is time aligned with the victim radar, i.e., having the same chirp slope and a short offset. Phase-coded FMCW radars will provide high jamming robustness in this case, and the use of orthogonal codes will also make MIMO radar operation possible, by enabling multiple simultaneous transmit waveforms.

Figure 6 Jamming due to identical radars with frequency offset and delay.

Figure 7 Radar return without phase coding, showing false and real targets (a). Phase coding reduces the false target by some 20 dB (b).
The requirements for coding are:
- Code length: The code length should achieve minimal range sidelobe levels with short sequences. A pseudo-random-noise (PRN) sequence length of 1024 results in a peak sidelobe level (PSLL) of about 30 dB, i.e., 10•log10(1024). Transmit codes together with receive filter weights can be optimized to improve the PSLL at the expense of SNR.
- Good cross-correlation properties: Cross-correlation coefficients of the members of a set should be zero to achieve separation between sensors.
- Doppler resistance: Phase-coded radar performance can suffer from the Doppler shift. Binary codes are Doppler intolerant, while polyphase codes degrade less rapidly.
- Available number of different codes: A large family size is better to assign a unique code to each radar sensor.
Figure 7a illustrates a radar echo with no phase coding, where the jamming signal appears as a false target. When the transmitted FMCW waveform is phase-coded with a PRN sequence, the jamming signal is suppressed, as shown in Figure 7b. The dynamic range is compromised with this method; however, the radar signal processor could use phase-coded FMCW for a few chirps to flag a false target, then switch back to normal operation.
Future Trends
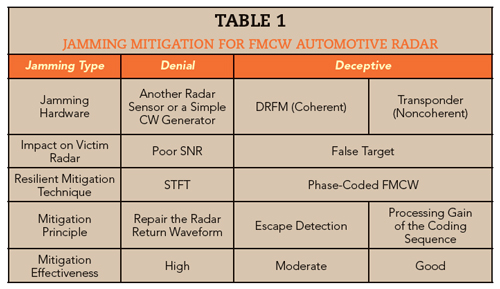
In congested automobile radar environments, jamming can be mitigated using advanced signal processing algorithms and complex waveform generation techniques. STFT-based signal processing can be used against denial attacks. Phase-coded FMCW provides an additional layer of resistance to both noncoherent and coherent deceptive attacks by using processing gain and interception avoidance. Table 1 summarizes these mitigation techniques. The jamming mitigation principles for automotive radar are also applicable for other radar sensors: robotics, road tolling, GPS and UAV landing or collision avoidance systems.
Currently, automotive radar sensors are operating in a non-cooperative mode, i.e., not communicating with each other. Although a cooperative mode of operation requires industry-wide harmonization, the arbitration between radar sensors would help resolve interference. A future radar concept including sensor cooperation is the fusion of communication nodes and radar sensors. Future radars with complex waveforms offer the possibility to include information in the radar signal, enabling the same hardware to be used simultaneously for radar and communications (RADCOM). Such a capability has the following benefits:
- Multi-user capability without interference.
- Coding the radar signal with OFDM or similar communication codes enables information to be contained in the radar signal.
- Simultaneous RADCOM.
5G mmWave transceivers with multi-GHz bandwidth and beam steering capabilities are candidates for use in a RADCOM system.